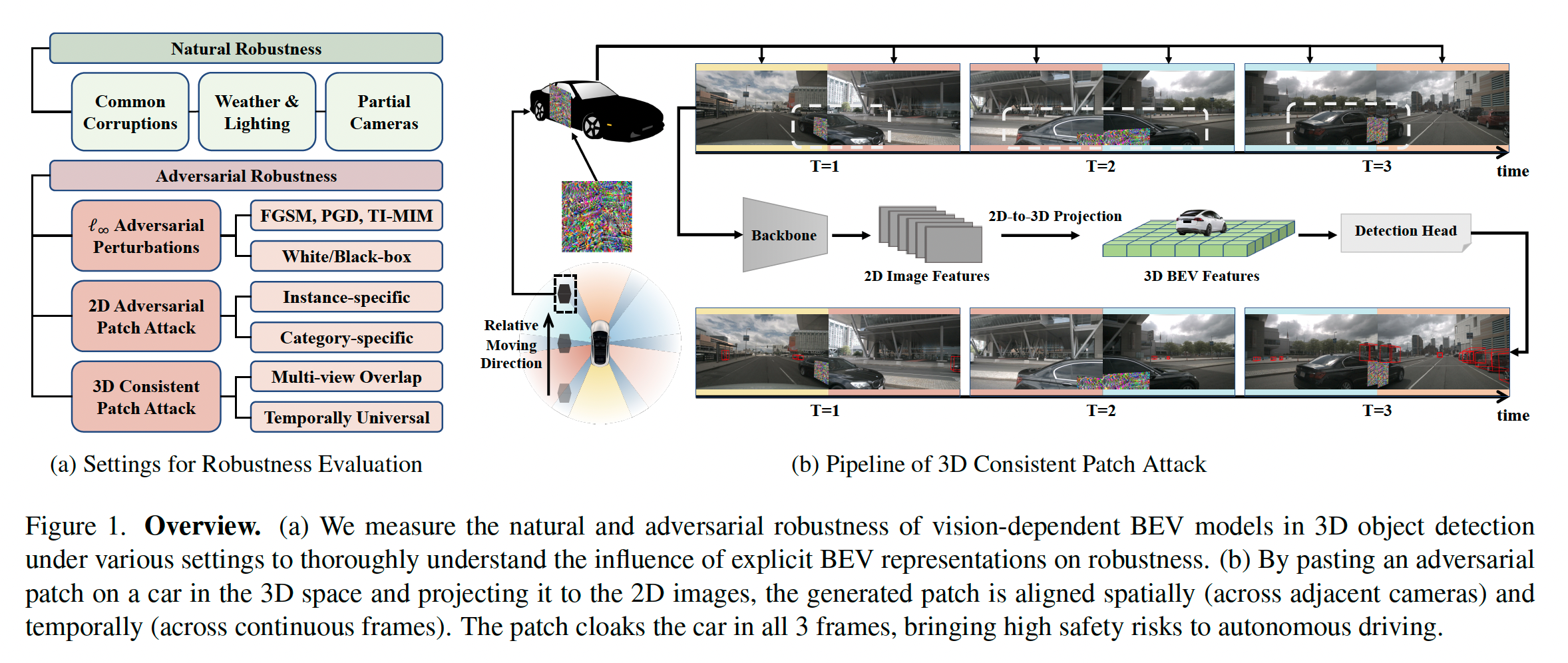
Understanding the Robustness of 3D Object Detectors with Bird’s-Eye-View Representations in Autonomous Driving
Published in IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, Canada, 2023
This paper conducts thorough evaluation on the robustness of vision-dependent 3D object detectors with explicit Bird’s-Eye-View (BEV) representations. The evaluation concerns both natural robustness and adversarial robustness under classic settings for computer vision and novel proposed settings specifically for auto-driving. The experimental results provide critical insights into the properties of BEV and could inspire future works to develop better BEV-based algorithms.